정보마당


[기고] 도심항공모빌리티와 오픈소스
[기고] 도심항공모빌리티와 오픈소스
SK 텔레콤, 김정석
I. 개요
화성 탐사를 위해 파견되었다가 예기치 않은 사고를 당해 홀로 남게 된 마크 위트니의 생존 및 탈출기를 서술한 인터넷 소설 마션(Martion)[1]의 첫 문장은 당황함을 넘어 황망함을 표현하는 비속어로 시작하고 있고, 정식으로 출간되었을 때조차 해당 부분은 정정 없이 그대로 인용되고 번역되었다. 인터넷 소설이라는 특성으로 흥미를 유발하기 위한 장치이기도 하지만, 아마도 미지의 땅(?)에서 정신을 잃었다가 깨어나서 현재 상태를 알아차리기에도 벅찬 순간에 앞으로 어떤 일이 벌어질지 상상도 할 수 없는 상태라는 것을 표현하기에는 원문에 사용된 비속어보다 더 적절한 표현이 없었기 때문일 것으로 보인다.
본 고에서 다루고자 하는 도심 항공 모빌리티(이하 UAM, Urban Air Mobility)에 대한 도전도 이와 유사한 상황이 아닐까 생각한다. UAM의 초기 아이디어는 차량 공유 서비스를 기반으로 하는 우버(Uber)의 자회사인 Uber Elevate에서 하늘길을 이용하는 새로운 형태의 교통 공유 서비스를 제공하겠다는 아이디어에서 출발하였다. 수직 이착륙을 위해 헬리콥터도 아닌, 전기 추력을 활용한 기체(eVTOL, electric Vertical Take-Off and Landing)을 활용한다는 것도 새로운 내용이었는데, UberX 서비스로 약 1시간 40분이 걸리는 구간을 수직 이착륙이 가능한 기체를 활용하여 15분으로 단축하면서도 UberX 대비 $10에서 $20 수준 정도 추가되는 서비스를 제공할 수 있다고 설명하고 있다[2]. 아쉽게도 2020년에 Uber Elevate가 eVTOL 제작사인 Joby Aviation에 인수[3]되면서 새로운 공유 서비스의 출시를 기대하기 어렵게 되었지만, 도심의 하늘길을 활용한다는 것과 Uber Elevate가 주장한 수준의 저비용으로 이용이 가능할 것으로 여겨지는 새로운 형태의 교통 체계인 UAM은 지속적으로 연구가 진행되고 있다.

그러나 UAM은 단순히 수직 이착륙이 가능한 안정성 있는 기체를 보유하는 것만으로 실현했다고 할 수 없다. 도심 내에서 운항하는 새로운 교통수단이 기존 항공 서비스처럼 복잡한 보안 검사와 수속절차를 거처야 한다면 특별한 상황에서 사용하는 교통수단으로 전락할 가능성이 높으며, 대중적인 성공을 기대하기는 어렵게 된다. 높은 고도에서 넓은 공간을 활용해서 고속으로 비행하는 기존 비행기와 달리, 도심 내에 짧은 거리의 항로를 매우 빈번하게 운행하게 될 것이기 때문에, UAM의 성공적인 상용화를 위해서는 비행체부터 교통관제와 이에 따른 승객 탑승 관리 및 안전까지 관여하는 부가 서비스들의 유기적인 연계가 필수적이다. 또한, 도심 내의 저고도(300미터 이상에서 600미터 이하)를 운행하는 특성으로 인해 비행체 이동 시 발생하는 소음은 하늘길 주위의 사람들에게 직접적인 영향을 미칠 수도 있고, 해당 고도에서 의도하지 않은 다른 물체들이 침범하여 안전사고를 유발할 수 있는 가능성 등 생각지 못한 변수들에 대해서도 대처하는 방안이 필요하다.
이에 따라 기존에 유사한 서비스를 제공하고 있는 어떤 사업자도 UAM에 대해서 기술적인 우위를 점하고 있다고 말할 수 있는 상황은 아니다. 현재의 UAM은 누구도 가보지 않은 길을 개척해 나아가는 것이며, 어쩌면 유망한 미래 산업 중에서도 각 연구기관, 기업과 정부 부처들이 가장 복잡한 이해관계로 얽히게 되는 산업 중의 하나일 수 있다.
기존에 경험하지 못한 일을 처음으로 수행하는 경우, 제 3자의 시각에서 볼 때는 개척자 정신 (the pioneer spirit)이라는 단어로 포장된 무기를 가지고 역경을 극복하는 과정과 일궈낸 멋진 결과를 보는 것은 소설 마션의 주인공 마크 위트니의 탈출기를 보는 듯한 흥미진진함이 있을 수 있다. 반면에 그 일을 수행해야만 하는 당사자이고 어떠한 심경일지 생각해본다면, 아마 각 단계를 설계하고 문제를 해결하는 과정에서조차도, 고안한 해결책이 정말로 옳은 방향으로 가고 있는 것인지 아니면 그렇게 믿고 싶은 것인지조차 헷갈려서 각 단계에 대한 검증을 거듭할 수밖에 없다. 더군다나 달성하고자 하는 목표에 대해서 낙관론과 비관론이 팽팽하게 줄다리기를 하는 상황이라면, 문제를 해결하고자 하는 당사자는 매 순간마다 자신의 선택에 대한 예상되는 결과를 시뮬레이션하고, 실제로 선택하고 실행했을 때 예상했던 결과가 맞는지, 혹은 오류가 있다면 어느 정도인지를 분석해서 자신의 선택에 관한 결과를 보정해 나가는 작업까지 수행해야 하기 때문에, 예상했던 기간과 예산을 훌쩍 뛰어넘는 경우도 비일비재하게 발생할 것이다.
본 고에서는, UAM의 상용화는, 그렇다고 해서 전혀 실현 가능성이 없다고 단정할 수 있는 것도 아니기에 앞으로 UAM 상용화를 위해 연구개발 부분의 관점에서 해법을 제시하기 위해 어떠한 노력을 할 수 있을지 알아보고자 한다.
2. UAM 로드맵: 낙관론과 비관론
미국에서는 NASA를 중심으로 일찌감치 National Campaign[4]이라는 이름으로 새롭게 등장할 교통 체계에 대한 실험을 수행하고 있고, 3번째 라운드인 NC-X3[5]를 통해 UAM 교통관리 체계를 구성하는 각 시스템 간의 API를 정의하고 1) 계획한 경로를 비행, 2) 계획한 경로를 비행 중 경로상의 문제를 회피하기 위해 비행경로를 수정하는 비행, 3) 목적지 혹은 비행체의 문제로 인한 착륙 대기 후 문제 해소 후 착륙 및 비행체 문제에 의한 비상 착륙에 대한 3가지 시나리오를 상정하고 이에 따라 교통관리 체계 내의 시스템과 비행체가 어떻게 운용되어야 하는지에 대해 검증하는 절차를 완료하였다.
유럽의 경우에는 EASA(European Union Aviation Safety Agency)에서 UAM과 관련하여, 2024년 혹은 2025년에 상용화될 것을 기대하고 있음을 발표하였고, 2024년 파리 올림픽에서 독일의 스타트업인 볼로콥터(Volocopter)의 기체로 시연을 할 예정[6]에 있다.
우리나라의 경우는 국토교통부 산하 국토교통과학기술진흥원을 중심으로 UAM 상용화를 위한 연구개발을 진행하고 있으며, 한국형 도심항공교통의 발전 방향을 제시하기 위하여 K-UAM 운용 개념서 1.0[7]을 발간한 바 있다. 휴전이라는 특수한 상황 때문에 대부분 하늘길이 비행 허가 구역으로 지정되어 있어 미국, 유럽과 달리 UAM의 실현이 어려울 것으로 생각할 수 있으나, 도심의 크기, 인구 밀집도, 이미 구축되어있는 ICT 인프라, 신기술 도입에 적극적인 시민 의식 등을 고려하였을 때 전 세계 도시 중에서 서울은 UAM의 성장 가능성이 가장 큰 지역 중의 하나로 전망[8]되고 있다.
[표 ] K-UAM 연도별 지표 (K-UAM 운용 개념서 1.0 발췌)
| 항목 | 2025~ (초기) | 2030~ (성장기) | 2035~ (성숙기) |
|---|---|---|---|
| 자동화 수준 | 자동화 도입 | 자동화 주도 인적 감시 | 완전 자동화 |
| 기체 운용 | 기장 운용 | 원격 운용 | 자동화 |
| 회랑 운용 방식 | 고정형 회랑 | 고정형 회랑망 | 동적 회랑망 |
| 항공 통신망 | 4G/5G 항공 음성 통신 |
5G/6G 저궤도 위성통신 C2 Link 1) |
|
| 입지 | 수도권 중심 | 수도권/광역권 | 전국 확대 |
1) C2 Link: Communication and Control Link, 무인항공기와 통제소간 비행 운영 목적의 데이터 링크
전 세계적으로 2025년부터 2030년 정도의 기간 내에 UAM 상용화의 원년으로 하기 위해 많은 노력을 기울이고 있다. 그러나 현실적으로 해결해야 하는 문제와 중요하지만 아직까지 표면으로 나타나지 않은 문제들 때문에 UAM 상용화에 대해서 회의적으로 바라보는 시각도 많이 존재한다.
제도적으로는 UAM 기체를 항공기로 보고 기존의 항공기 안전에 관한 규제를 적용할 것인지, 혹은 전혀 다른 종류의 교통 체계로 여기고 새로운 안전 규정을 마련할지에 대한 연구와 결정이 필요하다. 기술적으로는 배터리 기반의 전기 추력(electric propulsion) 장치에 대한 신뢰도 확보 문제, 해당 기체를 충전하기 위해 필요한 공간 및 전력 인프라 확보부터 UAM 이용자를 위한 서비스까지 아우르는 거대 시스템의 통합이 과연 2025년 혹은 2030년까지 가능할지에 대한 의문이 제기되고 있다. 그러나 낙관론과 비관론 사이에서 공통된 의견은 UAM은 새로운 교통 체계로 상용화에 성공한다면 우리의 삶에 많은 긍정적인 변화를 기대할 수 있을 것으로 보고 있다는 것이고, 주된 의견 차이는 그 실현 시기가 언제인지를 논하고 있다는 점은 매우 고무적이라 할 수 있다.
3. UAM 구조
K-UAM 운용 개념서에서 제시하고 있는 초기 UAM 교통 체계의 구조는 다음과 같다. 익숙하지 않은 이름의 많은 시스템이 등장하고 앞으로도 몇 년간은 성숙한 모델을 만들기 위한 연구개발이 꾸준히 진행될 예정이지만, [Figure 2]에서 제시하는 구조는 앞서 기술한 기체부터 사용자를 위한 서비스까지의 데이터의 흐름을 나열한 것이다.
각 시스템의 명칭과 연결 관계는 연구개발 과정에서 연구자들의 합의를 거쳐서 정제되고 변경될 예정이기 때문에 향후 발표될 운용개념서 다음 버전에서는 다른 형태로 표현될 수 있다. 예를 들어 PSU(Provider of Services for UAM)의 경우, K-UAM에서는 UATMSP(Urban Air Traffic Management Service Provider)로 변경하여 UAM 전반적인 서비스를 지칭하는 것이 아니라 교통관리의 주체로 한정되는 서비스임을 표기하려고 하고 있다.
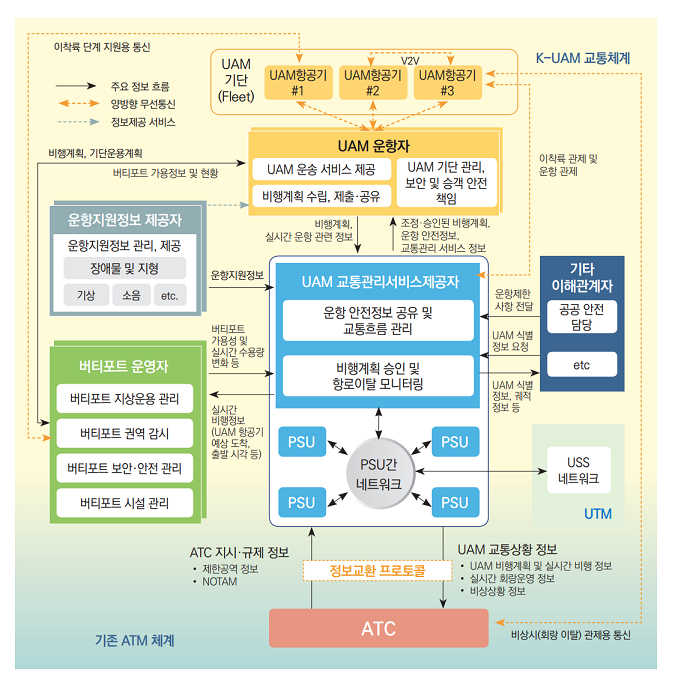
앞서 제시한 [표1]에 따르면, 기체의 데이터를 교환하는 통신조차도 기존 항공기와 다르게 상용 통신망인 4G와 5G를 활용할 것으로 계획하고 있고, 기존 항공기가 사용하는 UHF/VHF 채널은 보조적인 역할을 수행할 것으로 기대하고 있다. 즉, 모든 시스템의 연동은 이더넷으로 기반으로 하는 프로토콜을 정의하는 것으로부터 시작한다고 볼 수 있다.
또한, 복수의 PSU(UATMSP)가 구조도 상에 표현된 것은 UAM 체계와 기존 항공 시스템과의 근본적인 차이를 이야기하는 것으로, 관제 시스템의 중앙 집중식 통제를 통해 UAM 기체의 운용을 지원하는 것이 아니라 UAM 서비스를 제공하는 다수의 사업자가 서로 간의 필요한 정보를 공유하면서 비행을 하게 되는 것을 의미하며, 이는 기존 항공 교통 체계에서는 없던 시스템으로 사업자에게는 보다 높은 자율성을 부여하면서도 안전 보장을 위한 신뢰성 있는 정보를 타 사업자와 공유하기 위한 시스템에 관한 연구가 필요하다는 것을 나타내고 있다.
4. UAM 상호 운용성을 위한 오픈소스 프로젝트
UAM은 이제 막 개념 정의를 마치고 초안을 실현하기 위한 방법과 교환할 데이터를 정의하기 위한 단계에 있다고 할 수 있다. 그러나 앞서 언급한 것처럼 수 많은 참여자들이 기존에 없던 시스템을 시행착오를 거치면서 견고하게 만들어 나아가야 하는 상황이고, 각 시스템이 유기적으로 결합되어 상호운용성(interoperability)을 보장하는 것이 UAM 성공의 열쇠라고 할 수 있다. 그러나 문제는 우주 항공 산업이 그러하듯이, UAM을 구성하는 시스템들 하나하나가 신기술의 집약체이며 지적 재산권으로 보호되는 매우 폐쇄적인 영역이라는 점이다.
이를 해결하기 위해, 각 사업자들이 폐쇄적으로 운용하는 시스템들의 고유 정보와 권리는 보호하면서, UAM 안전 보장을 위한 최소한의 필수정보를 선택적으로 투명하게 공유하는 체계를 만들기 위해서 PSU 간 네트워크 개념을 도입하였으며, 이는 DSS(Discovery and Synchronization Service)가 담당하고 있다. DSS의 Discovery는 타 PSU가 제공하는 정보를 탐색하는 것을 의미하며, Synchronization은 DSS에 연결된 PSU가 동일한 정보를 획득할 수 있음을 의미한다. 그래서 UAM 교통관리 체계 내에 존재하는 다수의 PSU간의 상호 운용성은 DSS를 통해서 확보한다고 할 수 있다.
사실 상호 운용성에 관한 연구는 NASA의 NC-X3에서 먼저 수행된 바 있는데 이 테스트 중 상호 운용성 검증을 위하여 참여자들이 운용하고 있는 리눅스 파운데이션의 InterUSS Platform 프로젝트[9]는 UAM과 관련하여 직접적으로 찾을 수 있는 거의 유일한 오픈소스 프로젝트이다. 핵심 프로토콜과 수행 절차는 ASTM International에 등록한 비행체에 ID를 부여하고 식별 및 추적하는 방법[10]과 고유 ID를 이용하여 각 시스템 간에 정보를 공유[11]하는 구조에 대한 표준안을 따르고 있고, 이를 바탕으로 필요한 소프트웨어 컴포넌트를 설계하고 외부 시스템과 연계할 API를 정의한 것이 InterUSS Platform 프로젝트이다.
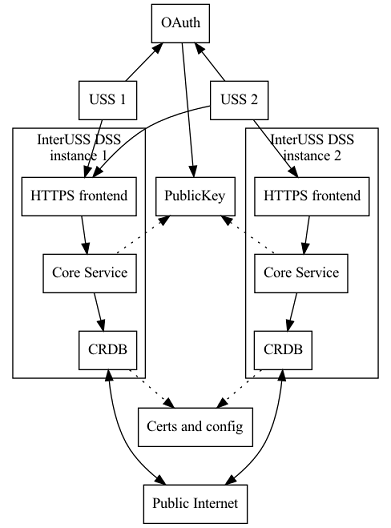
[Figure 3] 비행체 운용 시스템 간의 정보를 교환하기 위한 DSS 구조 개념도 (InterUSS Github 발췌)
이 프로젝트의 저장소에서 주목할 만한 점은 InterUSS Platform 코드 자체가 아니라, 앞으로 필요한 연구에 대한 초석을 제공하고 있다는 점이다. 해당 소스 코드 저장소에서는 테스트 결과뿐만 아니라 자신들이 설계한 API와 시스템 구조를 [Figure 3]과 같이 쉽게 설명하기 위해 많은 노력을 기울이고 있는 것을 볼 수 있다.
5. K-UAM의 방향
다시 우리나라의 상황을 살펴보자면, 현재 K-UAM에 수 많은 참여자들을 유인하는 주체는 아무래도 정부 기관인 국토교통부가 담당하고 있다. 그러나 정작 실현 방법에 대해서는 정부 기관을 포함한 모든 참여자들이 스스로 문제를 정의하고 해결책을 찾아야만 한다. 마찬가지로 상호 운용성의 중요성은 공감하고 있고, 각 참여자들이 보유하거나 개발하는 시스템들을 연동하여 하나의 거대한 K-UAM 시스템으로 동작하게 하기 위해서 국토교통부와 한국항공우주연구원의 주도하에 K-UAM Grand Challenge 1(이하 K-UAM GC1)을 기획하고 수행할 예정[12]에 있다.
K-UAM GC1의 목적은 상호 운용성을 준수하는 범위 내에서 각 참여자들은 자유롭게 자신들 고유의 시스템을 설계하고 배포할 수 있으며 실제 환경하에서 실험을 하고 그 결과를 토대로 다시 참여자들 고유의 시스템을 개선하여 K-UAM 상용화를 준비하는 것이라고 할 수 있다.
K-UAM은 NASA의 NC보다는 조금 늦게 진행되고 있지만, 다행히도 오픈소스로 공개된 선행 연구 결과를 부분적으로 활용함으로써 더 진보된 시스템을 구성할 수 있을 것이라고 예상하고 있고, K-UAM의 연구 진행 방향에 따라서 얼마든지 오픈소스 프로젝트와 협업이 가능할 것으로 생각된다. 그러나 UAM과 같이 새롭게 시도되면서 수 많은 참여자들과 진행 방향에 대해서 논의하고 협업해야 하는 구조에서는 단순히 오픈소스 프로젝트를 이용하거나 특정 프로젝트에 공헌하는 것으로 국지적인 해결책을 모색하는 함정에 빠져 전체적인 시스템 내의 상호 운용성을 확보하기란 매우 어려울 수 있다.
이러한 관점에서 InterUSS Platform 프로젝트는 K-UAM에 여러 가지 시사점을 제공해주고 있다. InterUSS Platform 프로젝트는 자신들이 생각한 시스템의 개발 방향을 공개함으로써 오픈소스 프로젝트 생태계에 의견을 요청한 것과 동시에 오픈소스 생태계에 공헌하는 두 가지 효과를 거둔 것이라고 볼 수 있을 것이다. K-UAM을 진행하는 과정에서 InterUSS Platform 프로젝트가 취한 접근 방법을 도입한다면 더 많은 논의와 협의를 통해 더 많은 참여자들을 유도할 수 있을 것이라고 생각된다.
6. 맺음말
UAM과 같이 새롭게 도전하는 영역에서는 개별 소프트웨어 엔지니어의 시각에서 바라보기보다는 전체적인 시스템의 관점에서 해당 프로젝트가 진행되는 형태와 방향을 살펴보아야 할 것이다. 또한, 다행히 선행 연구의 산출물이 존재하고 활용할 가치가 충분하다면, 그 산출물 자체에 대한 활용에 그치는 것이 아니라 산출물을 얻게 되는 과정까지, 즉 의사 결정의 과정에 대해서 탐구하다 보면 선행 연구보다 더 진보된 결과를 얻을 확률이 높아지게 된다. K-UAM에서도 목표를 실현하는 과정에서 많은 참여자들의 노력이 빛을 발휘할 수 있도록 효과적이고 합리적인 연구개발 방법론이 정착되기를 기대해 본다.
 |
김정석, Ph. D (현) SK Telecom, T3K, 매니저 (전) Collabora, Ltd., Open source software consultant |
※ 참고문헌
| [1] | A. Weir, 마션, 서울: 알에이치코리아, 2015. |
| [2] | “Fast-Forwarding to a Future of On-Demand Urban Air Transportation,” Uber Elevate, 2016. |
| [3] | "Joby Aviation Welcomes New $75M Investment from Uber as it Acquires Uber Elevate and Expands Partnership," Joby Aviation, 8 Dec 2020. [Online]. Available: https://www.jobyaviation.com/news/joby-aviation-welcomes-new-75m-investment-from-uber-as-it-acquires-uber-elevate-and-expands-partnership/. |
| [4] | "Advanced Air Mobility National Campaign," [Online]. Available: https://www.nasa.gov/aamnationalcampaign. |
| [5] | N. Carven, S. Verma, S. Monheim, A. Cheng, R. Wood, V. Dulchinos, C. Seah, F. Renema, A. Farrahi, D. Zahn, D. Liddell, J. Lin, M. Gurram, Q. Li, M. Snycerski and M. Cencetti, "X3 Simulation with National Campaign-Developmental Test (NC-DT) Airspace Partners," National Aeronautics and Space Administration, 2021. |
| [6] | T. Hepher, "Europe regulator sees first flying taxis in 2024 or 2025," Reuters, 19 May 2021. [Online]. Available: https://www.reuters.com/article/ctech-us-europe-uam-idCAKCN2D01IL-OCATC. |
| [7] | 한국형 도심항공교통 (K-UAM) 운용 개념서 1.0, UAM Team Korea, 2021. |
| [8] | “하늘위에 펼처지는 모빌리티 혁명, 도심 항공 모빌리티,” Samjong Insight, 제 70, 번호: UAM 시장의 잠재력과 스케일업(Scale-up) 과제, p. 17, 2020. |
| [9] | "InterUSS Platform," [Online]. Available: https://interussplatform.org/. |
| [10] | "Standard Specification for Remote ID and Tracking," ASTM, 2020. |
| [11] | “Standard Specification For UAS Traffic Management (UTM) UAS Service Supplier (USS) Interoperability,” ASTM, 2022. |
| [12] | "K-UAM Grand Challenge 1," [Online]. Available: http://kuam-gc.kr/. |

| 번호 | 제목 | 작성자 | 조회수 | 작성 |
|---|---|---|---|---|
| 공지 | [2024년] 오픈소스SW 라이선스 가이드 개정판 발간 file | support | 12394 | 2024-01-03 |
| 공지 | [2024년] 기업 오픈소스SW 거버넌스 가이드 개정판 발간 file | support | 9888 | 2024-01-03 |
| 공지 | [2024년] 공공 오픈소스SW 거버넌스 가이드 개정판 발간 file | support | 9835 | 2024-01-03 |
| 공지 | 공개 소프트웨어 연구개발(R&D) 실무 가이드라인 배포 file | support | 22363 | 2022-07-28 |
| 공지 | 공개소프트웨어 연구개발 수행 가이드라인 file | OSS | 20739 | 2018-04-26 |
| 418 | [4월 월간브리핑] 오픈소스 기술을 활용한 기술혁신으로 항공우주산업의 경쟁력 강화 | support | 3977 | 2022-04-26 |
| 417 | [기획] 우주로 쏘아 올린 오픈소스 | support | 5193 | 2022-04-26 |
| 416 | [기고] 도심항공모빌리티와 오픈소스 | support1 | 4202 | 2022-04-25 |
| 415 | [3월 월간브리핑] 오픈소스 기술, 로봇시장과 결합하여 신기술개발 및 협업⋅공유문화 확산 | support | 2486 | 2022-03-29 |
| 414 | [기획] 오픈소스로 가까워지는 로봇 시대 | support1 | 6060 | 2022-03-28 |
| 413 | [기고] 오픈소스와 로봇 | support1 | 4218 | 2022-03-28 |
| 412 | [2월 월간브리핑] SBOM이 사이버 보안을 개선하는 데 미치는 영향 | support1 | 6366 | 2022-02-21 |
| 411 | FINOS 보고서로 분석한 금융계의 오픈소스 현황과 도전과제 | support | 1962 | 2022-01-25 |
| 410 | [1월 월간브리핑] 금융권의 적극적인 오픈소스 도입으로 IT 경쟁력 강화 추진 | support | 3277 | 2022-01-25 |
| 409 | [기획]국내 금융기관의 오픈소스 활용 현황 | support | 7285 | 2022-01-24 |
0개 댓글